ロボットなどのメカトロニクス機器は、モータを動力エネルギー源(アクチュエータ)としています。
このページでは、主にマイコンからDCモータを駆動する回路について、実験結果を中心に解説していきます。
DCモータの一例
ここに紹介している回路の部品は、秋月電子通商で
安価に販売されています。
2SC1815GR(3円),2SA1015(3円),
2SJ380(100円),
H7N0307AB(180円)など、ただしまとめ買いが必要ですので、
最初に大量に購入して置くのが良いでしょう
モータを正逆転させるには、接続する電源の極性を入れ替えればよいわけで、
下図のようにトグルスイッチ(2回路中点OFF双投)を用い、手でバチバチと切り替える「機械的」
なやり方でも良いわけですが、次のような欠点があります。
- 火花が飛んで破壊するなど「機械的」に困難を伴う。
- したがって、大電流を扱うには大型のスイッチが必要で、操作系がかさばる。
- マイコン出力から操作できない。

| MOS-FETによる単方向回転モータドライブ基本回路 |
そこで、Power MOS-FETを用いて「電子スイッチ」を構成すれば、これらの問題が
スッキリ解決できます。
Power MOS-FETはスイッチング速度が速く、ON抵抗が低く大電流を流せるので、
モータの駆動には最適です。
まず、下図にMOS-FETによる単方向回転モータドライブの基本回路を示します。
- (A)N-MOS_FET H7N0307AB、(PWM駆動特性図):大変簡単で高性能!お勧め
- (B)N-MOS_FET H7N0307AB、プッシュプルバッファ付、(PWM駆動特性図)
- (C)P-MOS_FET 2SJ380、(PWM駆動特性図)
- (D)P-MOS_FET 2SJ380、プッシュプルバッファ付、(PWM駆動特性図)
【(A)N-MOS_FET H7N0307ABについて】
本回路は大変シンプルですが高性能で、PWM駆動特性はスイッチング周波数
が120kHz以上でも、ほとんど直線性が変わりません。それに、
H7N0307ABはON抵抗が4.6mΩと極端に小さいので、発熱も少ないです。
さて、FETは電圧駆動素子ですので、ゲート入力に対して電圧(3V程度でONする、電流はほとんど不要)を
かけてやればよいのですが、マイコン(CMOS-IC)から直結するのは、少しばかり危険です。
まず、入力とゲートに直列に入っている抵抗R1は「ダンパ抵抗」と言われるもので、あの押し開き
ドアについているショックアブソーバと一緒で、ドアを強く開け閉めさせないためのものです
(制御工学的に言うと、オーバーシュートを生じさせないため)。したがって、あまり小さいと
意味がありませんし、かといって大きすぎると駆動エネルギを損します。実験から、だいたい
この47Ω~100Ωというのが程良い値のようです。
次に、ゲートとグラウンド(アース)に並列に入っている抵抗R2は「ゲート接地抵抗」(昔の真空管
時代の言葉ならグリッドリーク抵抗)と呼ばれるものです。R2が無くて「ゲートが浮いている」
状態だと、FETは入力抵抗が高いので、小さいノイズなどに反応し不安定になって、最悪は燃え(焼け)
てしまいます。ここでは、わざとR2を1kΩと小さめの値に選び、安定性を高め、入力電流を多く流して
スイッチングしやすくしています。こういうのをブリーダ抵抗と言います。
また、モータに並列に入っている(ファストリカバリ)ダイオードD1は「フライホイール・
ダイオード」と言ってOFF時にモータが発生する電圧を電源ラインに逃がすためのもので、
無くても良いのですが、無理な駆動をする場合には付けておきます。
【(B)N-MOS_FET H7N0307AB、プッシュプルバッファ付について】
トランジスタQ2/Q3のプッシュプルバッファは、入力容量の高いMOS-FETを充放電駆動するための回路です。
PWM駆動特性としては、スイッチング周波数が高くなると同じPWMデューティ比でも
回転数が低くなります。
どうやら、このような数A(アンペア)程度を流すPower MOS-FETにはプッシュプルバッファはあまり
必要がないようですが、数十A(アンペア)も流す入力容量の高いMOS-FETの駆動には効果があるとのことです。
ここで、トランジスタQ1はマイコン出力(5V)で駆動するための電圧シフタです。
しかしながら、このトランジスタQ1(2SC1815)は、NPNのバイポーラ構造をしているため、P形のベース領域に
自由電子が入り込んでONしていたとして、それからいざOFFしようとしても自由電子がすぐに抜けずに
いわゆる「切れ」が悪くなります。
そこで、ダイオードD1と「スピードアップ・コンデンサC1」によって、この自由電子を積極的に
吸い出すことによって、下図のようにこれを改善できます。
 ...
...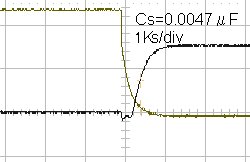
スピードアップ・コンデンサの容量は小さすぎても効果がなく、また大きすぎても負電圧が大きく発生して
好ましくありません。ここでは、
スピードアップ・コンデンサ容量と遅れ時間の関係を実験して選択します。
ここでは、0.0047μFに選びました。
【(C)P-MOS_FET 2SJ380について】
P-MOS_FETは、基準電圧がグラウンド(GND)ではなくプラス電源電圧となります。したがって、
マイコンとの接続は「プラス電源が共通」で、グランドが独立するという、使い難いことになります。
PWM駆動特性としては、面白いことにN-MOSの場合と逆にスイッチング周波数
が高くなると同じPWMデューティ比でも回転数が高くなります。
【(D)P-MOS_FET 2SJ380、プッシュプルバッファ付について】
この場合、PWM駆動特性としては、スイッチング周波数が高くなると
回転数がかなり高くなり、また
2SJ380はON抵抗が150mΩとN-MOS(
H7N0307ABは4.6mΩ)に比べて高く、発熱も多くなります。
これは、P-MOS_FETのキャリアである正孔(ホール)は、N-MOS_FETのキャリアである自由電子よりも、
移動度が3倍遅いというところに理由があります。またON抵抗もNチャネルの方が低い品種があります。
しかしながら、この下に示す。C-MOS構成(上側をP-MOS、下側をN-MOS)とするには、P-MOSは
欠かせない存在であり、高性能なP-MOSが登場することが、ずっと以前から強く強く望まれてきています。
ずっと懸案になってきていた「MOS-FETによるHブリッジ・モータ正逆転回路」の
新しい回路を設計試作し、大変良好な結果を得られましたので報告します。
この「電子スイッチ」は下の回路図に示しますように、H型にMOS-FETを配置し、
左上Q1と右下Q4のFETをONすればモータは正回転(CW)し、
右上Q3と左下Q2のFETをONすればモータは逆回転(CCW)します。
ここで、上側(ハイサイド)はPチャネルMOS-FET
(
2SJ380)で、<
下側(ローサイド)はNチャンルMOS-FET
(
H7N0307AB)であり、
ゲート(G)がダンパ抵抗(10オーム)を介して共通になっていますので、いわゆるC-MOSになっています。
(ここで、出力はドレイン(D)を共通としていることに注意してください。)
(FETの駆動回路部分については、ココをお読みください)
さて、C-MOS構成ですので、A点(あるいはB点)を電源(この場合12V)の中点(6V)をスレッショルドとして、
「ハイ」にするとローサイドがON、ハイサイドがOFFになり、
「ロー」にするとローサイドがOFF、ハイサイドがONになります。
すなわち、次の表のような動作モードとなります。
| A |
B |
MODE |
| LOW | LOW | BRAKE |
| LOW | HIGH | CW |
| HIGH | LOW | CCW |
| HIGH | HIGH | BRAKE |
- 注意1:A点(あるいはB点)を6V程度にするのは危険です。
上下両方がONになり、貫通電流が流れて破壊する可能性があります。
- 注意2:後述しますが、MOS-FETのHブリッジだけで12V電源のモータ回路を、
5Vのマイコン等の出力で直接に駆動すると、中途半端な値となるので大きな貫通電流が流れて
危険です。少なくとも初段2SC1815による電圧シフタ回路は必須です。(もちろん、6V電源のモータ
なら問題ありません。)
C-MOSのHブリッジで注意したいのは全てのFETをOFFにすることができないので、モータを「フリー」の
状態にはできないことです。「フリー」にするためには、4個全てのFETを独立に駆動するしか
ありません。しかしそうすると、左右どちらか側のFETを上下ともONにすると「燃えて」しまいます。
C-MOS(ゲートを共通)にしておくとその心配はありません。
ここで、左上(右上)のPチャンルMOS-FETを常にONにしておき、右下(左下)のNチャネルMOS-FETを
PWM信号でON/OFFすることによりモータ速度を可変することができます。(下半分の回路はテスト用の
PWM発振回路と、入力切り替えの回路です。)
なお初段の電圧シフタで論理が反転しますので(プッシュプルバッファでは反転しない)、
上の回路図の上半分のドライバ込みのHブリッジは「負論理」の方が有利です。
すなわち、PWM駆動する場合は、L入力とR入力のどちらかをHIGH、もう片方にPWM信号を入力
にします。こうすると、ローサイドの高速なNチャネルMOS-FET(H7N0307)がスイッチング
されることになり(左右反対側のハイサイドの低速なPチャネルMOS-FETは常にON)、
高速応答が期待できます。(上の図の下半分のテスト回路の出力がNANDであるのは、そのためです。)
| L |
R |
MODE |
| LOW | LOW | BRAKE |
| LOW or PWM | HIGH | CCW(PWM) |
| HIGH | LOW or PWM | CW(PWM) |
| HIGH | HIGH | BRAKE |
PWM駆動特性もリニアで良好ですが、スイッチング周波数は24kHzが実用的です。
(工業的には騒音防止のためからスイッチング周波数を14kHz以上にしなければなりません。)
スイッチング周波数を高くしていくと40kHz程度で電流が沢山流れ苦しくなりだします、これはハイサイドのP-MOS
が付いて来れないためのようで、発熱もハイサイドの方が大きくなります。
(誤解の無いようにコメントしておくと、PWM駆動しない回転方向切り替えのON/OFFだけなら、10A
ぐらいの大電流を流すことが可能です。)
| MOS-FETによるHブリッジ・モータ正逆転回路のオプトカプラによる駆動 |
 MOS-FETのHブリッジを、Power MOS-FET駆動用のフォト(オプト)カプラ東芝TLP250(300円/個)
で駆動してみます。TLP250は下図に示すように、
出力がプッシュプルバッファで駆動されており、Power MOS-FETを強力に駆動することが出来ます。
MOS-FETのHブリッジを、Power MOS-FET駆動用のフォト(オプト)カプラ東芝TLP250(300円/個)
で駆動してみます。TLP250は下図に示すように、
出力がプッシュプルバッファで駆動されており、Power MOS-FETを強力に駆動することが出来ます。
(TLP250のデータシートは
東芝のデータシート検索システムから入手できます。)
フォトカプラとは、入力信号によってLEDを光らせ、それをフォトトランジスタで受けて出力を
得るもので、ノイズが多いモータ側の電源から、ノイズに弱い入力側のマイコン系の電源を、
グラウンドを含めて完全に分離することができます。
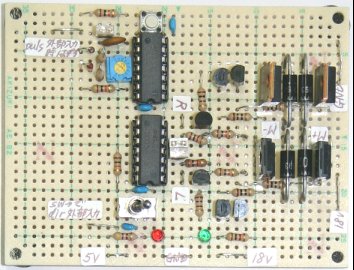
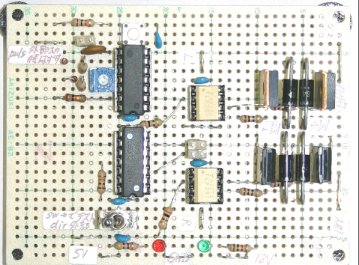
全体の回路図と写真を下に示します。ずいぶんと回路が簡単になることが分かります。
実験の結果、PWM駆動特性が大変良好であり、スイッチング周波数も48kHzで十分実用
になることを確認できました。
(工業的には騒音防止のためからスイッチング周波数を14kHz以上にしなければなりません。)
スイッチング周波数を高くしていくと60kHz程度までは大丈夫で、70kHz程度から電流が沢山流れ苦しくなりだします
、これはハイサイドのP-MOSが付いて来れないためのようで、発熱もハイサイドの方が大きくなります。
参考のために、DCモータ正逆転駆動専用ICである東芝TA8429H(450円/個)を評価してみました。
TA8429Hは入力ロジック回路、ドライバ回路、Hブリッジ回路、フリーホイールダイオードなど、ほとんど全てが
内蔵されており、最小の外付け部品で回路を構成することができます。
(TA8429Hのデータシートは
東芝のデータシート検索システムから入手できます。)
入力信号はTTLレベル(5V)で動作モード(フリー、CW、CCW、ブレーキ)を切り替えられます。
また2~3Aまでの電流を流せます。
実験の結果、PWM駆動特性は全然考慮されていないらしく、上の回路図にあるスイッチング周波数は1kHz
ならなんとか可能(それでもデューティに対してリニアではない)で、
5kHz以上では保護回路が働くらしく回転もしません。そのかわり異常に発熱することもありません。
ということで、TA8429Hなどは、おとなしく、PWM速度調節なしの回転方向指定のONとOFFだけで使うものだと
いうことが分かりました。
ずっと懸案になってきていた「MOS-FETによるHブリッジ・モータ正逆転回路」の
新しい回路を設計試作し、実験結果を報告いたしました。
この実験は、「PLLモータ速度制御系の位置サーボへの応用」の研究において、
なるべく高い周波数でPWM駆動を行えるモータ正逆転回路を評価するために行い、
以下の知見が得られました。
- 電圧シフタに用いるバイポーラトランジスタ2SC1815を高速化するスピードアップ・
コンデンサは0.0047μFが適当であることを実験で確かめた。
- この実験で用いたH7N0307や2SJ380のような、あまり入力容量の大きくない
Power MOS-FETの駆動には、プッシュプルバッファ(2SC1815/2SA1015)はあまり
必要が無いことが分かった。
- C-MOS構成のHブリッジ回路(ハイサイド2SJ380、ローサイドH7N0307)により、
正逆転が可能であることが分かった。
- C-MOS構成では、フリー状態にすることはできないが、ハイサードとローサイドが
同時にONすることが無いので、貫通電流で破壊(燃える)する心配がないことが分かった。
- 実用となるPWM周波数は、電圧シフタ-プッシュプルバッファの場合は24kHz、
フォトカプラTLP250を使った場合は48kHzまで可能なことが実験で確認できた。
TLP250は大変優秀である。
- 専用ICのTA8429Hは大変便利であるが、PWM駆動は考慮されていないらしく、
1kHzならなんとか可能であるが、5kHz以上だと保護回路が働いて回転しない。
ということで、結論としては、TLP250 + Hブリッジ回路(ハイサイド2SJ380、ローサイドH7N0307)
が回路も簡単で、高速のPWM駆動ができるという見通しが得られました。
PWM速度調節なしの回転方向切り替えのON/OFFだけなら、TA8429Hが便利で、大電流をながすなら
Power MOS-FETでHブリッジを組んだ方が良いと言えます。
さて、PチャネルMOS-FETよりもNチャネルMOS-FETの方が性能が高い(移動度がホールよりも自由電子の方が高い、
またON抵抗もNチャネルの方が低い品種がある)ので、全てNチャネルMOS-FETでHブリッジを構成することも考えられます。
しかしその場合、ハイサイドのFETの基準点が電源ラインでなくモータとなるので、その駆動方法が問題になります。
例えば倍電圧整流回路でハイサイドのドライバを動かすなどの工夫が必要になってしまいます。
また、電圧シフタ、プッシュプルドライバも全FET分の4組が必要になり回路規模的に苦しくなります。
(全N-MOSのブリッジの専用駆動IC(IOR社のIR2011が有名)も存在します)
それでも、より大電流で、より高速で駆動するためにはチャレンジのしがいがあるでしょう。
ロボコンの回路部分をやっている学生さん(回路屋さん)は、この辺りのことをよく研究して
知っています(FETが燃える(飛ぶ)ことも経験してきています)。
ロボットがガンガン動いているのは実は回路屋さんのこのような努力があるのです。
{kind=link}
{kind=link}
{kind=link}
{kind=link}