
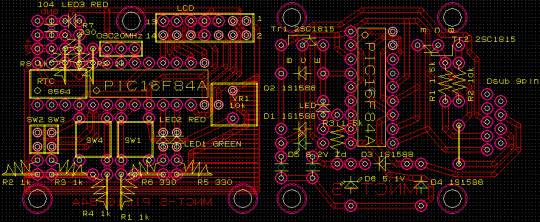
写真1 ラップ・カウンタ全景(実物大)
| 舞鶴技術研究会・技術講演会より(2004/2/28(土)) |
|---|





if(input(PIN_A4)==0) {
delay_ms(20);
if(input(PIN_A4)==0) {
///// rctcap01 RTC , lap counter/////
#include <16f84.h>
#fuses HS,NOWDT,NOPROTECT,PUT
#use delay(CLOCK = 20000000)
#use fast_io(A)
#use fast_io(B)
#use i2c(MASTER, SDA=PIN_A0, SCL=PIN_A1, ADDRESS=0xa0, FORCE_HW) // I2C使用宣言
#define mode 0 ////// 液晶表示ライブラリ設定
#define input_x input_B //ポートB使用
#define output_x output_B
#define set_tris_x set_tris_B
#define stb PIN_B3
#define rs PIN_B2
#byte port_a=5
#include "lcd_lib.c" // 液晶ライブラリ
#include "rtc_lib.c" // RTCライブラリ
#include "rtc_lap.c" // ラップ計算
///// メイン関数
void main()
{
int pa;
int lap=-1;
set_tris_a(0x3F); // A-port all input
output_float(PIN_A1); //SCLピン定義
output_float(PIN_A0); //SDAピン定義
lcd_init(); //LCD初期化
lcd_cmd(0x0C); // cursor off
lcd_clear();
year=0x03; month=0x90; week=0x00; day=0x12; hour=0x00; min=0x00; sec=0x00;
rtc_date_set();
rtc_date_read();
rtc_lap_init();
while(1) { //永久ループ
rtc_date_read();
lcd_cmd(0x00); //1行目の先頭へ
lcd_cmd(0x02);
printf(lcd_data," Now %c%c:%c%c:%c%c",h_hour,l_hour,h_min,l_min,h_sec,l_sec);
if(input(PIN_A4)==0) {
delay_ms(20);
if(input(PIN_A4)==0) {
lap++;
if(lap==0) {
year=0x03; month=0x90; week=0x00; day=0x12; hour=0x00; min=0x00; sec=0x00;
rtc_date_set();
rtc_date_read();
}
rtc_lap_calc();
lcd_cmd(0xC0); //2行目の先頭へ
printf(lcd_data," Lap%2d %c%c:%c%c:%c%c",lap,hl_hour,ll_hour,hl_min,ll_min,hl_sec,ll_sec);
do {} while(input(PIN_A4)==0);
}
}
}
}
// LCD表示 16文字×2
// 0123456789ABCDEF
// Now 12:34:56
// Lap01 00:00:12
///////////////////////////////////////////////
// 液晶表示器制御ライブラリ
// 内蔵関数は以下
// lcd_init() ----- 初期化
// lcd_cmd(cmd) ----- コマンド出力
// lcd_data(chr) ----- 1文字表示出力
// lcd_clear() ----- 全消去
//////////////////////////////////////////////
//////// データ出力サブ関数
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //表示データの場合
else
output_low(rs); //コマンドデータの場合
delay_cycles(1); //NOP
output_high(stb); //strobe out
delay_cycles(2); //NOP
output_low(stb); //reset strobe
}
//////// 1文字表示関数
void lcd_data(int asci)
{
lcd_out(asci, 0); //上位4ビット出力
lcd_out(asci<<4, 0); //下位4ビット出力
delay_us(50); //50μsec待ち
}
/////// コマンド出力関数
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //上位4ビット出力
lcd_out(cmd<<4, 1); //下位4ビット出力
delay_ms(2); //2msec待ち
}
/////// 全消去関数
void lcd_clear()
{
lcd_cmd(0x01); //初期化コマンド出力
delay_ms(15); //15msec待ち
}
/////// 初期化関数
void lcd_init()
{
set_tris_x(mode); //モードセット
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
// I2C RTC EPSON RTC-8564 functions By H.machida@MNCT-S 2003/10/9
// rtc_lib.c
// global variables
int year,month,week,day,hour,min,sec; // 現時刻
char h_year,h_month,h_week,h_day,h_hour,h_min,h_sec; // 現時刻文字2桁め
char l_year,l_month,l_week,l_day,l_hour,l_min,l_sec; // 現時刻文字1桁め
// 【<1>日付時刻設定】
void rtc_date_set()
{
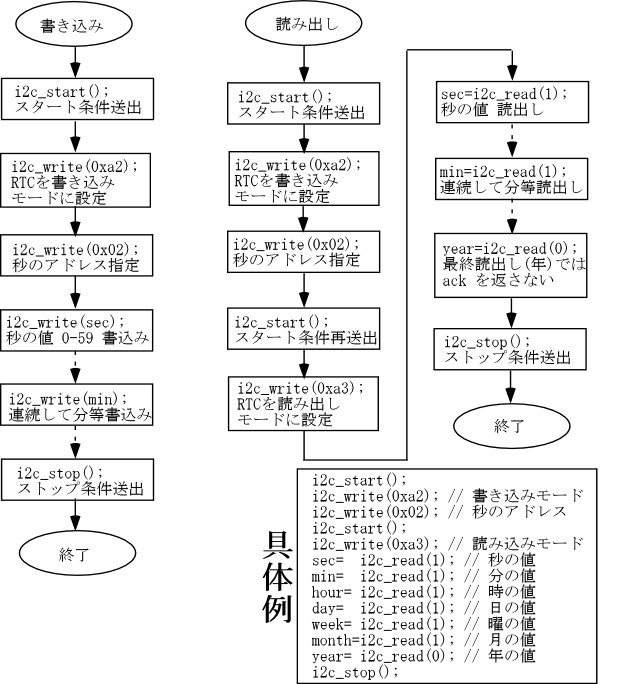
i2c_start();
i2c_write(0xa2); // 書き込みモード
i2c_write(0x02); // 秒のアドレス
i2c_write(sec); // 秒の値 0-59
i2c_write(min); // 分の値 0-59
i2c_write(hour); // 時の値 0-23
i2c_write(day); // 日の値 1-31
i2c_write(week); // 曜の値 日月火水木金土 0123456 上位5bitはDon't Car
i2c_write(month);// 月の値 (C:MSB)1-12 Cは1のとき21世紀
i2c_write(year); // 年の値 00-99
i2c_stop();
}
// 【<2>日付時刻読み出し】
void rtc_date_read()
{
i2c_start();
i2c_write(0xa2); // 書き込みモード
i2c_write(0x02); // 秒のアドレス
i2c_start();
i2c_write(0xa3); // 読み込みモード
sec= i2c_read(1); // 秒の値
min= i2c_read(1); // 分の値
hour= i2c_read(1); // 時の値
day= i2c_read(1); // 日の値
week= i2c_read(1); // 曜の値
month=i2c_read(1); // 月の値
year= i2c_read(0); // 年の値
i2c_stop();
h_sec= (( sec>>4)&0x07)|0x30; l_sec= ( sec&0x0f)|0x30;
h_min= (( min>>4)&0x07)|0x30; l_min= ( min&0x0f)|0x30;
h_hour= (( hour>>4)&0x03)|0x30; l_hour= ( hour&0x0f)|0x30;
h_day= (( day>>4)&0x03)|0x30; l_day= ( day&0x0f)|0x30;
h_week= 0; l_week= ( week&0x0f)|0x30;
h_month=((month>>4)&0x01)|0x30; l_month=(month&0x0f)|0x30;
h_year= (( year>>4)&0x0f)|0x30; l_year= ( year&0x0f)|0x30;
}
// 【<3>アラームの設定】毎時10分にアラーム出力する。
void rtc_alarm_set(int aweek,int aday,int ahour,int amin)
{
i2c_start();
i2c_write(0xa2); // 書き込みモード
i2c_write(0x09); // アラーム分のアドレス
i2c_write(amin); // アラーム分の値 0-59 MSBはAE
i2c_write(ahour); // アラーム時の値 0-23
i2c_write(aday); // アラーム日の値 1-31
i2c_write(aweek); // アラーム曜の値 日月火水木金土 0123456
i2c_stop(); // 上位5bitは Don't Care
}
// 【<4>タイマ、周波数の設定】周波数1Hz,タイマ10秒設定
void rtc_timer_set(int tfreq,int tcont,int timer)
{
i2c_start();
i2c_write(0xa2); // 書き込みモード
i2c_write(0x0D); // クロック出力周波数のアドレス
i2c_write(tfreq); // クロック出力周波数の値
i2c_write(tcont); // タイマ制御値
i2c_write(timer); // タイマ値
i2c_stop();
}
// I2C RTC EPSON RTC-8564 functions By H.machida@MNCT-S 2003/10/9
// rtc_lap.c
// global variables
// int year,month,week,day,hour,min,sec; // 現時刻
// char h_year,h_month,h_week,h_day,h_hour,h_min,h_sec; // 現時刻文字2桁め
// char l_year,l_month,l_week,l_day,l_hour,l_min,l_sec; // 現時刻文字1桁め
char hb_hour,hb_min,hb_sec; // 前時刻文字2桁め
char lb_hour,lb_min,lb_sec; // 前時刻文字1桁め
char hl_hour,hl_min,hl_sec; // ラップ時間2桁め
char ll_hour,ll_min,ll_sec; // ラップ時間文字1桁め
char ht_hour,ht_min,ht_sec; // 待避用時刻文字2桁め
char lt_hour,lt_min,lt_sec; // 待避用時刻文字1桁め
//
void rtc_lap_init()
{
hb_hour=h_hour; hb_min=h_min; hb_sec=h_sec;
lb_hour=l_hour; lb_min=l_min; lb_sec=l_sec;
}
// 【ラップ時間=現在時刻-前時刻】
void rtc_lap_calc()
{
ht_hour=h_hour; ht_min=h_min; ht_sec=h_sec;
lt_hour=l_hour; lt_min=l_min; lt_sec=l_sec;
if(lb_sec > l_sec) { l_sec+=10; hb_sec++; }
ll_sec=(l_sec-lb_sec)|0x30;
if(hb_sec > h_sec) { h_sec+=6; lb_min++; }
hl_sec=(h_sec-hb_sec)|0x30;
if(lb_min > l_min) { l_min+=10; hb_min++; }
ll_min=(l_min-lb_min)|0x30;
if(hb_min > h_min) { h_min+=6; lb_hour++; }
hl_min=(h_min-hb_min)|0x30;
if(lb_hour > l_hour) { l_hour+=10; hb_hour++; }
ll_hour=(l_hour-lb_hour)|0x30;
if(hb_hour > h_hour) h_hour+=3;
hl_hour=(h_hour-hb_hour)|0x30;
hb_hour=ht_hour; hb_min=ht_min; hb_sec=ht_sec;
lb_hour=lt_hour; lb_min=lt_min; lb_sec=lt_sec;
}