-
舞鶴市近辺の産学官共同の技術系連合である舞鶴技術研究会の情報システム分科会では、平成14年度の「もの作りプロジェクト」として「1チップマイコンの応用技術」を企画しました。この勉強会はその初めての活動として、舞鶴高専地域共同テクノセンターの協力を得て、同センター情報システム開発支援室で行います。
この勉強会の目的は、最近話題の1チップマイコンを使用して「もの」を実現できるようになることです。 具体例としては、機械学会主催の「ロボットグランプリ」の競技課題である ロボットランサーを設計製作します。
なお、平成14年11月には公式な講習会を開催する予定です。
-
マイクロ・コンピュータ(micro computer)は電子制御機器の中核として、例えば炊飯器、ミシン、洗濯機、自動車、etc,etcに
使われています。もはや、必要不可欠な存在と言ってよいでしょう。
- ワン・ボード・マイコン
- 原始的なワンチップ・マイコン
- RAMとI/O、タイマーをひとつのパッケージに集約した製品(40pin)
- 256byteのRAM
- 8bitの入出力ポートを2組 (PORT A、PORT B)
- 6bitの入出力ポートを1組 (PORT C)
- 14bitのプログラマブルカンターを1組
- 最近のワンチップ・マイコン
- 小型・・・・ 18ピンDIP、28ピンDIP、40ピンDIP
- 高速・・・・ 最大1命令200ns、RISCアーキテクチャ
- 広範囲な動作電圧・・・・最小2Vから6Vで動作 消費電力最小30uA
- メモリ・・・・512〜4KBのEEPROM
- 入出力ピン・・・LED直接駆動可能な容量、入力/出力プログラマブル
- 開発環境・・・・アセンブラ、シミュレータがBBSで提供されている
- ROMライタ・・・PICSTRATとして販売されている。簡単な自作も可能
- 低価格・・・・秋葉原で1個500円〜で入手可能
- その他・・・・パワーオンリセット、ウォッチドッグタイマ内蔵1、A/Dコンバータ、シリアルポート、PWM出力付きあり
しかしながら舞鶴高専電子制御工学科でも最近は、3年生の「計算機工学Ⅰ」で初めて触れられるだけで、それも 「基本情報処理技術者試験」で出題されるCASL2/COMET2という仮想のアセンブラ/マイコンを取り扱っているだけです。
以前には、電気工学科ではi8085、電子制御工学科や機械工学科ではZ80を取り上げていました。しかしながら、その内容 は、命令を覚えることにきゅうきゅうとし、実際にものを制御するというのはなかなかたどりつけなかったのでは ないでしょうか?
また、実際にシステムを実現するには下図のようにCPU(Z80)のほかにメモリ(S-RAM)や並列入出力LSI8255を 搭載したワンボードマイコンを使用していました。とても、気軽に使える物ではなく、それなりの値段が しました。

 一方で、昔からINTEL 8155
のような少ないLSIでマイクロコンピュータシステムが構成できることを大きな
売りにしていたLSIが存在していました。簡単な応用例ではこれで十分でしたが、
命令セットが貧弱で、何より処理速度が遅く(数MHz)、ちょっと満足できないものでした。
一方で、昔からINTEL 8155
のような少ないLSIでマイクロコンピュータシステムが構成できることを大きな
売りにしていたLSIが存在していました。簡単な応用例ではこれで十分でしたが、
命令セットが貧弱で、何より処理速度が遅く(数MHz)、ちょっと満足できないものでした。
《8155の特徴》
 しかし、最近になって
ごく小規模な組み込み用途向けのコントローラ
として、20ピン以下の1チップ・マイコンが
流行しています。例えば、米国Microchip Technology社のPICや、米国Scenix社のSXや、米国Atmel社のAVRなどです。
これは後者ほど最近になって出現した物で、どんどん洗練されてきています。ただし、前者ほど実績があります。
開発ツール(ソフトウェア)が豊富でパソコンで簡単に開発できるところが最大の魅力です。
しかし、最近になって
ごく小規模な組み込み用途向けのコントローラ
として、20ピン以下の1チップ・マイコンが
流行しています。例えば、米国Microchip Technology社のPICや、米国Scenix社のSXや、米国Atmel社のAVRなどです。
これは後者ほど最近になって出現した物で、どんどん洗練されてきています。ただし、前者ほど実績があります。
開発ツール(ソフトウェア)が豊富でパソコンで簡単に開発できるところが最大の魅力です。《PICの特徴》
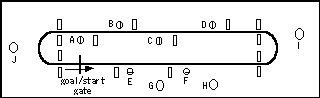 ロボットランサー競技 とは、
エネルギー源と制御装置を内蔵した自律型ロボットが、槍を装備して左図に示す円周状
のコースラインを周回しながらコースの左右にある標的を突いて制限時間内に獲得した
得点を競う競技です。コースは黒色に塗装されたベニヤ板に幅19mmの白色テープでできています。
ロボットランサー競技 とは、
エネルギー源と制御装置を内蔵した自律型ロボットが、槍を装備して左図に示す円周状
のコースラインを周回しながらコースの左右にある標的を突いて制限時間内に獲得した
得点を競う競技です。コースは黒色に塗装されたベニヤ板に幅19mmの白色テープでできています。コースラインは、長さ8mの直線路と半径0.5mの円弧でできた円周路となっています。 槍は長さ150mm以上の棒を1本だけ装備可能です。
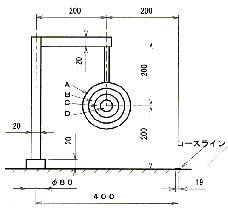 標的は、左図に示す的型(以下、的標的と呼ぶ:上図のA〜F)と、
円柱型(以下、円柱標的:上図のG〜J)の2種類で、的標的はコースに対して
垂直なものと水平な物に別れます。的標的は大きさ、点数共ばらばらですが、
円柱標的は全て点数が100点で直径80mm高さ250mmです。
標的は、左図に示す的型(以下、的標的と呼ぶ:上図のA〜F)と、
円柱型(以下、円柱標的:上図のG〜J)の2種類で、的標的はコースに対して
垂直なものと水平な物に別れます。的標的は大きさ、点数共ばらばらですが、
円柱標的は全て点数が100点で直径80mm高さ250mmです。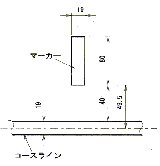 的標的にはそれぞれその手前0.6m前に白のマーカが左図に示すように付けられています。
的標的にはそれぞれその手前0.6m前に白のマーカが左図に示すように付けられています。

さて、ロボットランサーは、床のラインをトレースし、また標的を突かねばならないわけですが、 それは下図の部品を使えば実現できそうです。
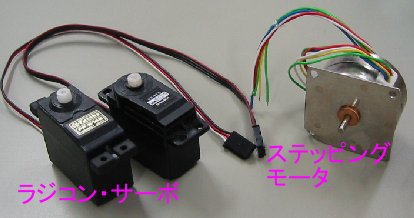
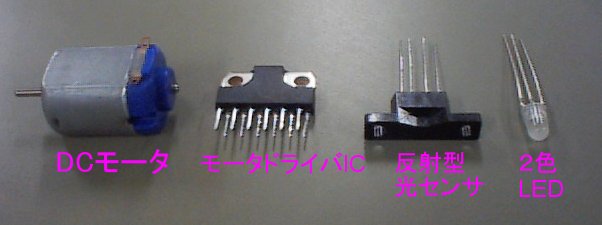
問題はこれらをいかにうまく制御するか (制御とは:目的を達成するために対象に必要な操作を加えること)です。 これを実現するのにPICマイコンを使いましょう。