 2005/03/08 舞鶴高専 電子制御工学科 町田秀和 2005/03/08 舞鶴高専 電子制御工学科 町田秀和
2005/03/08 舞鶴高専 電子制御工学科 町田秀和 2005/03/08 舞鶴高専 電子制御工学科 町田秀和 ←写真をクリックすると動画が見れます。
←写真をクリックすると動画が見れます。
最近、秋葉原の秋月電子通商や、大阪日本橋のデジットなどの部品屋さんに
安価な機械式のロータリエンコーダ
が売っています。
ロータリエンコーダのカウンタはFPGAで簡単に実現
できますので、値の設定が楽にできそうです。
ところがデータシートのスペック上、チャタリング期間が最大5msecもあって、
なかなかキレイにカウントすることが難しいようです。
もちろん、RC積分回路(R=1MΩ、C=0.1uF くらいがスイッチのチャタリング防止
にはよいらしい:トランジスタ技術の回路100選とかいう記事にある由)を入れますが、
シユミットトリガ・バッファICを通すまでは面倒なところです。
また、ロータリエンコーダカウンタでは回転方向を判定するために
0,1(ロー/ハイ)ともにチャタリングを除去しなければなりません。
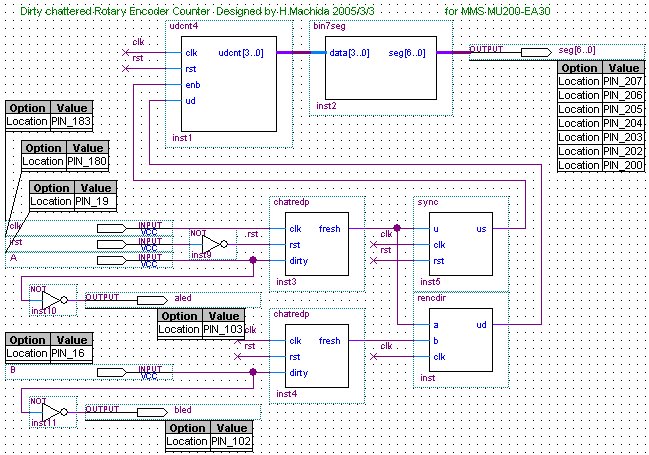
そこで、下の付録に示すチャタリング除去回路をVHDL言語で記述してみました。
チャタリング除去では定番のシフトレジスタ(3bit)の値が全て0あるいは1になれば、
出力をその値にすると言うことで、0,1両レベルのチャタリングを除去しています。
また、シフトレジスタを駆動するタイミングはシステムクロック(20MHz)を多段分周(11bit)
することにより与えています。だいたいこの位でうまくチャタリングが除去できるようです。
ロータリエンコーダの種類によってこのあたりを調整すればよいでしょう。
さて、このようにロータリエンコーダカウンタをハードウェア(FPGA)で実現するのと、
マイコンのソフトウェアで実現
(例えば、
AVRロータリーエンコーダの処理方法)するのと、どちらが良いのでしょうか?
PICやAVRなどの1チップマイコンは大変安価で開発環境もフリーで簡単ですから非常に
取り付きやすいでしょう。またFPGAで実現しても結局マイコンとのインターフェースを考えねば
ならないかもしれません。
しかしながら、FPGAならば例えばカウンタ長さを何ビットでも設定可能ですし、また
大変高速(100kHz以上など)でも問題なく対応できます。それに、最近のFPGAはますます
大規模になり、SOPC(System on Programmable Chip)といってマイコンを埋め込んでしまう
ということも現実的ですので、柔軟な取り組みが可能になります。
------------------------------------------------
-- Mechanical Rotary Encoder Chattering Reducer
-- System clk 20MHz
------------------------------------------------
library ieee;
use ieee.STD_LOGIC_1164.all;
use ieee.std_logic_unsigned.all;
entity chatredp is
port( clk,rst : in std_logic;
dirty : in std_logic;
fresh : out std_logic );
end;
-----------------------------------------
architecture RTL of chatredp is
signal cnt : std_logic_vector(10 downto 0);
signal que : std_logic_vector(2 downto 0);
signal tmp : std_logic;
begin
fresh <= tmp;
process (clk) begin
if(clk'event and clk='1') then
if(rst='1') then
cnt <= (others => '0');
que <= (others => '0');
else
cnt <= cnt + '1';
if(cnt = "00000000000") then
que(2)<=que(1); que(1)<=que(0); que(0)<=dirty;
end if;
if( que = "111") then tmp<='1';
elsif(que = "000") then tmp<='0';
end if;
end if;
end if;
end process;
end RTL;
{kind=link}