2.1 ワン・ボード・マイコン(1回目)
2.2 原始的なワンチップ・マイコン(1回目)
2.3 最近のワンチップ・マイコン(1回目)
4.1 ワンチップマイコンとは(2回目)
4.2 レジスタ(2回目)
5.1 命令(2回目)
5.2 アセンブラMPLABの使い方(2回目)
6.1 条件付ループ(2回目)
6.2 サブルーチン(2回目)
第3回は町田が会議が長引いて、ろくな対応ができなくてすみませんでした。
しかし、ハード製作が始まりこれからが本番です。がんばりましょう。
- 写真集
- 回路図
- PIC16F84A-20/Pを動作させるには、レゾネータ20MHzだけが必要。また、4番ピンMCLRは 負論理のリセット端子であり、プルアップしてリセット用の押しボタンスイッチを接続する。 これはプルアップしなくても動作することもあるが、不安定になることがあるらしい。
- センサは反射型フォトインタラプタを使用する。LED,光トランジスタとも 負荷抵抗が必要なだけである。
- アクチュエータはDCモータ(マブチモータ130)であり、モータドライバICのTA8429Hで、 左右のモータごとに、前進、後進、ブレーキ、フリーの駆動が可能である。TA8429Hの外付け部品は 一切不要であるが、モータにはノイズ除去のためにパスコン0.1μFを接続する。
- 状態表示用の2色LEDはPICで直接駆動することができる。
- 部品表
まず第2回の最後に、3Sの藤井君に(既に完璧なデモ走行してもらった!!)紹介してもらった ロボットランサーのトレースカーの部分の写真集をご覧ください。
下の動画(アニメーションGIF)は上方と前方から見た走行の様子です。 動画をクリックすると、mpeg1ムービーによるよりスムーズな動画が見られます。
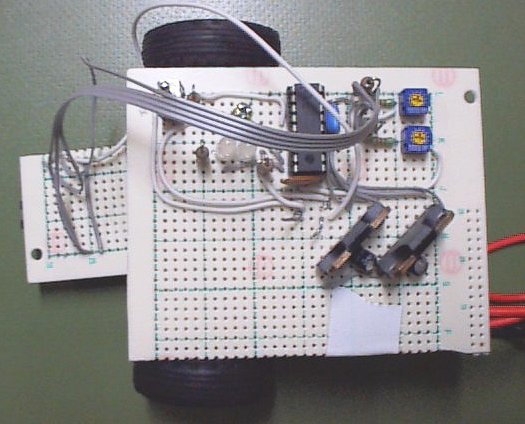 左の写真は、真上から見た部品配置の様子です。
(左が進行方向です。)
左の写真は、真上から見た部品配置の様子です。
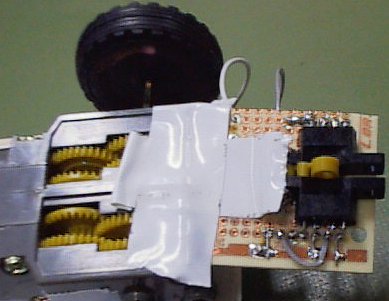
(左が進行方向です。)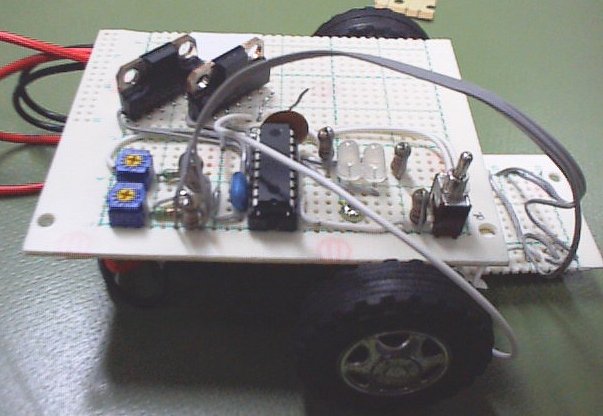 下の写真は、ななめ上から見た部品配置の様子です。
(右が進行方向です。)
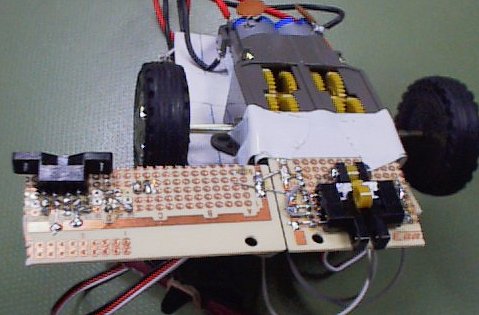
下の写真は、ななめ上から見た部品配置の様子です。
(右が進行方向です。)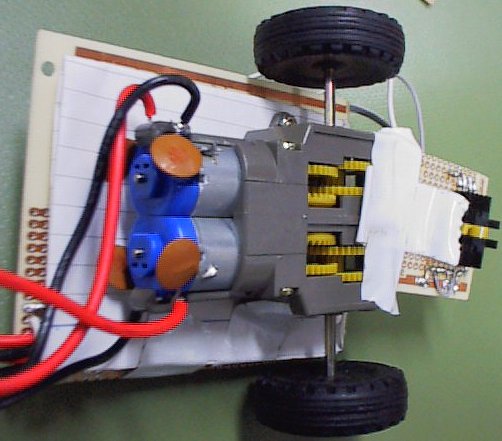 左の写真は、下から見た部品配置の様子です。
(右が進行方向です。)
左の写真は、下から見た部品配置の様子です。
(右が進行方向です。)後モータ後駆動(RR)です。 F1のようにギアボックスで全ての剛性を得ています。:-)
 左の写真は前輪部分です。前輪は「ソリ」
でビニールテープで
「いいかげんに固定」してあります。
これでもまともに走行するという事実も制御の面白いところです。
左の写真は前輪部分です。前輪は「ソリ」
でビニールテープで
「いいかげんに固定」してあります。
これでもまともに走行するという事実も制御の面白いところです。さあ、どう仕上げましょうか?
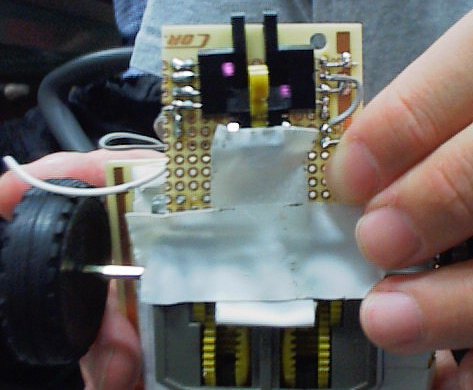 左の写真はラインセンサ(反射型フォトインタラプタ)の発光している様子です。
左の写真はラインセンサ(反射型フォトインタラプタ)の発光している様子です。赤外線ですので肉眼では見えませんが、デジカメならこのとおりはっきり見えます。 動作確認には必須です。
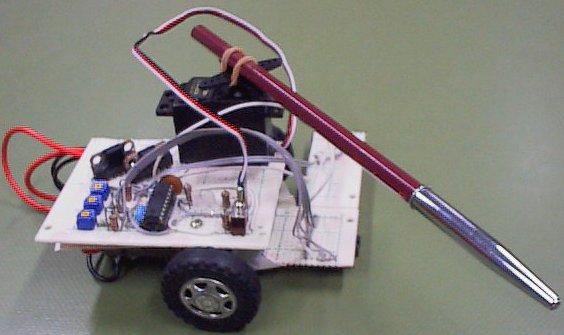 左の写真は、第4回までに3S藤井君が製作してくれた
ラジコンサーボ(FUTABA)による「槍」とそれ用のセンサ
つきの本体です。これで、ロボットランサーになりました。
左の写真は、第4回までに3S藤井君が製作してくれた
ラジコンサーボ(FUTABA)による「槍」とそれ用のセンサ
つきの本体です。これで、ロボットランサーになりました。
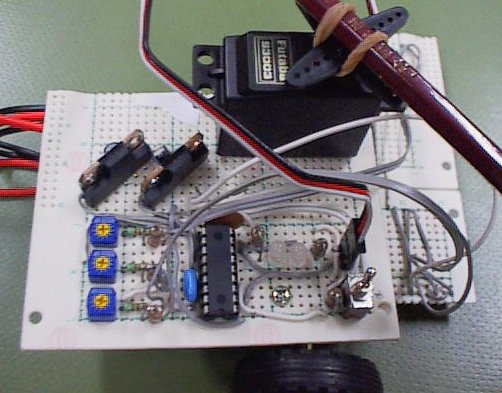 左の写真は、情報から見た回路部分です。
ラジコンサーボとそれ用のセンサの部分用の
回路が追加されています。
左の写真は、情報から見た回路部分です。
ラジコンサーボとそれ用のセンサの部分用の
回路が追加されています。
 左の写真は、センサの配置状況です。
左の写真は、センサの配置状況です。
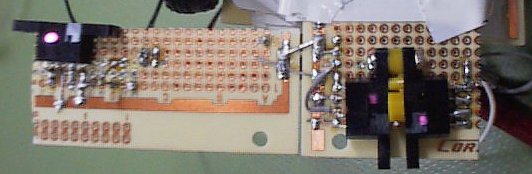 左の写真は、センサの発光状況です。
左の写真は、センサの発光状況です。
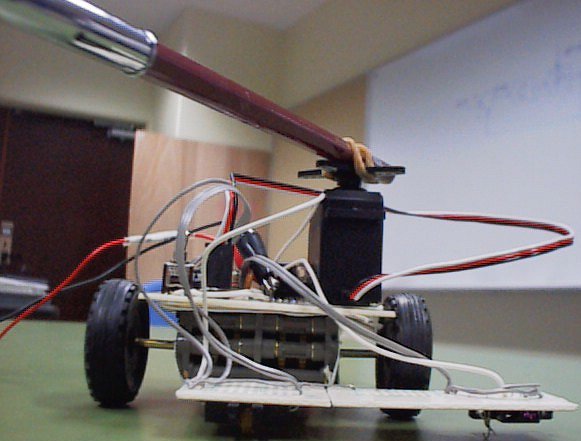 左の写真は、前方から見た配置状況です。
左の写真は、前方から見た配置状況です。西山先生が言われたように「ラジコン・サーボの回転中心」が 右側にオフセットしていてバランスが若干悪く、走行性能が 満足できていません。
ここから、いろいろと見直して仕上げていきましょう。
回路図を下に示します。
ここにある部品は、ほとんど全て日本橋の有名なジャンク屋さんの デジットで購入しました。
特徴は次のとおりです。
| 番号 | 品名 | 規格 | 個数 | 単価 | 金額 | 備考 |
| IC1 | PICマイコン | PIC16F84A-20/P | 1 | 450 | 450 | |
| IC2,3 | モータドライバIC | 東芝 TA8429H | 2 | 500 | 1000 | |
| OSC1 | レゾネータ | 3本足コンデンサ内臓20MHz | 1 | 30 | 30 | |
| S3 | ICソケット | DIP18pin | 1 | 10 | 10 | |
| D1,2 | LED | 2色Kasode-common | 2 | 30 | 60 | |
| PC1,2 | 反射型フォトカプラ | SHARP P?? | 2 | 200 | 400 | ラインセンサ |
| SW1 | 押しボタンスイッチ | 汎用 | 1 | 30 | 30 | |
| GB1 | ギヤボックス | TAMIYA | 1 | 680 | 680 | 130モータ2個つき |
| TY1,2 | ゴムタイヤ | ゴムタイヤ | 2 | 10 | 20 | |
| R1-5 | 抵抗 | 1/4W,1kΩ | 5 | 10 | 50 | |
| R6,7 | 抵抗 | 1/4W,330Ω | 2 | 10 | 20 | |
| VR1,2 | 半固定抵抗 | 50kΩ(B) | 2 | 50 | 100 | 感度調整用 |
| C1-3 | 積層セラミックコンデンサ | 0.1μF/50V | 3 | 10 | 30 | パスコン |
| C4,5 | 電解コンデンサ | 10μF/50V | 2 | 45 | 90 | デカップリング |